RECHERCHE

ARCOS
L’automobile a le plus évolué grâce à la mécatronique et l’électronique embarquée qui permettent des aides à la conduite toujours plus performantes (ABS, ESP, GPS, Park Assist, …).
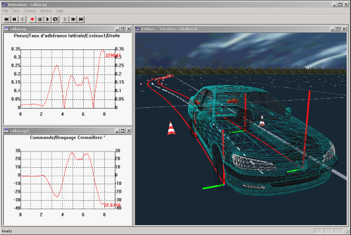
L’adhérence est le paramètre le plus important pour la sécurité actuellement inconnu des systèmes d’aide à la conduite en roulage normal. Dans le cadre du programme de recherche ARCOS 2004, partie du PREDIT, Gilles Schaefer a proposé une méthode originale embarquée dans le véhicule d’identification de l’adhérence, mise en oeuvre de manière intégrée par les 7 partenaires.
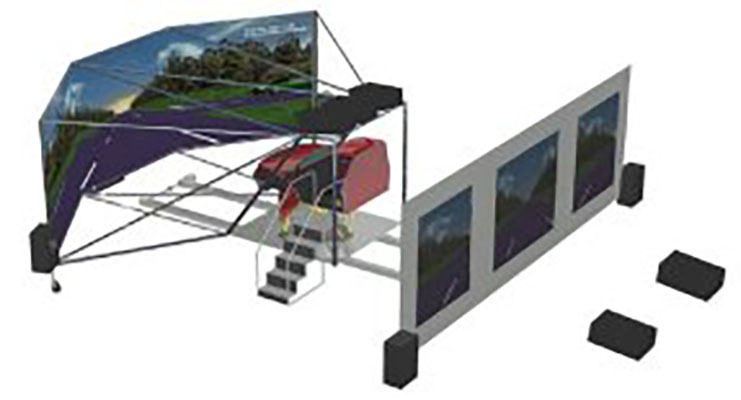
Le principe est de placer un simulateur de conduite dans la voiture et de comparer les réponses de la voiture réelle et de la voiture virtuelle (méthode du modèle).
pour plus d’informations publiques, voir les publications n° 26, 27 & 32.


SARI
Dans le cadre du PREDIT, CAR&D a été sélectionné pour participer au programme de Recherche SARI, sur les thémes :
• RADARR : Recherche des Attributs pour le Diagnostic Avancé des Ruptures de la Route, étudiant le risque d’une rupture physique de l’itinéraire en rase campagne
• IRCAD : Informer des Risques de rupture de l’itinéraire en Conditions Atmosphériques Dégradées, étudiant le risque lié à l’adhérence par temps de pluie, ou au vent
VEHICULES ROBOTISES AUTONOMES
Le développement d’Aides à la Conduite de haut niveau va conduire progressivement à des véhicules autonomes robotisés.
Dans le cadre de ses recherches, le laboratoire ACIS de l’Université de Paris-Sud-Orsay a chargé CAR&D de co-concevoir avec lui et réaliser une voiture partiellement robotisée. Le choix s’est porté sur la Renault Zoé, véhicule très moderne, et dont le réseau CAN permet de lire les capteurs existants et d’écrire des commandes. De nombreux capteurs ont été ajoutés (caméras, GPS, centrale d’attitude, odométrie fine…)